16.4 温度传感器 DS18B20
DS18B20 是美信公司的一款温度传感器,单片机可以通过 1-Wire 协议与 DS18B20 进行通信,最终将温度读出。1-Wire 总线的硬件接口很简单,只需要把 DS18B20 的数据引脚和单片机的一个 IO 口接上就可以了。硬件的简单,随之而来的,就是软件时序的复杂。1-Wire总线的时序比较复杂,很多同学在这里独立看时序图都看不明白,所以这里还要带着大家来研究 DS18B20 的时序图。我们先来看一下 DS18B20 的硬件原理图,如图16-12所示。
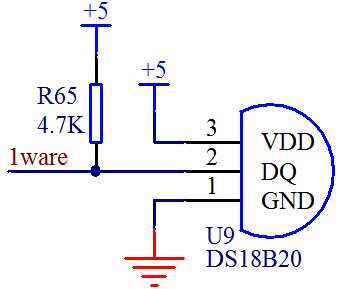
图16-12 DS18B20 电路原理图
DS18B20 通过编程,可以实现最高12位的温度存储值,在寄存器中,以补码的格式存储,如图16-13所示。
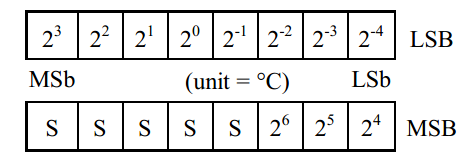
图16-13 DS18B20 温度数据格式
一共2个字节,LSB 是低字节,MSB 是高字节,其中 MSb 是字节的高位,LSb 是字节的低位。大家可以看出来,二进制数字,每一位代表的温度的含义,都表示出来了。其中 S表示的是符号位,低11位都是2的幂,用来表示最终的温度。DS18B20 的温度测量范围是从-55度到+125度,而温度数据的表现形式,有正负温度,寄存器中每个数字如同卡尺的刻度一样分布,如图16-14所示。
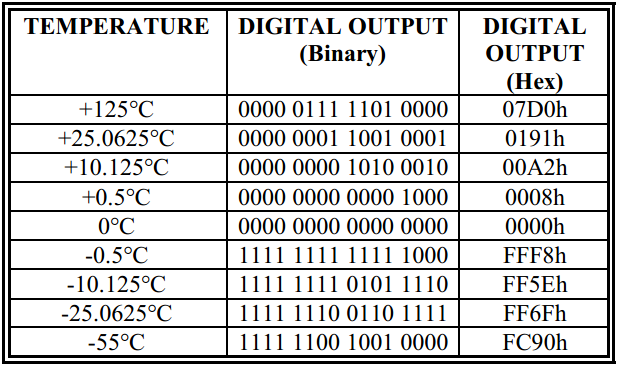
图16-14 DS18B20 温度值
二进制数字最低位变化1,代表温度变化0.0625度的映射关系。当0度的时候,那就是 0x0000,当温度125度的时候,对应十六进制是 0x07D0,当温度是零下55度的时候,对应的数字是 0xFC90。反过来说,当数字是 0x0001 的时候,那温度就是0.0625度了。
首先,我先根据手册上 DS18B20 工作协议过程大概讲解一下。
1)初始化 和 I2C 的寻址类似,1-Wire 总线开始也需要检测这条总线上是否存在 DS18B20 这个器件。如果这条总线上存在 DS18B20,总线会根据时序要求返回一个低电平脉冲,如果不存在的话,也就不会返回脉冲,即总线保持为高电平,所以习惯上称之为检测存在脉冲。此外,获取存在脉冲不仅仅是检测是否存在 DS18B20,还要通过这个脉冲过程通知 DS18B20 准备好,单片机要对它进行操作了,如图16-15所示。
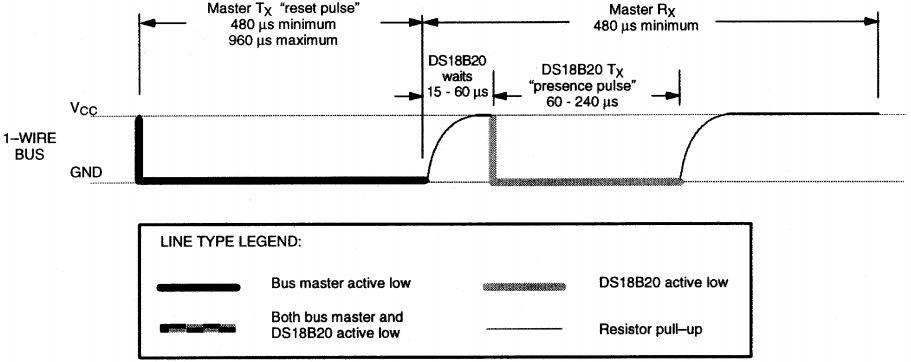
图16-15 检测存在脉冲
大家注意看图,实粗线是我们的单片机 IO 口拉低这个引脚,虚粗线是 DS18B20 拉低这个引脚,细线是单片机和 DS18B20 释放总线后,依靠上拉电阻的作用把 IO 口引脚拉上去。这个我们前边提到过了,51单片机释放总线就是给高电平。
存在脉冲检测过程,首先单片机要拉低这个引脚,持续大概 480 us 到 960 us 之间的时间即可,我们的程序中持续了 500 us。然后,单片机释放总线,就是给高电平,DS18B20 等待大概15到 60 us 后,会主动拉低这个引脚大概是60到 240 us,而后 DS18B20 会主动释放总线,这样 IO 口会被上拉电阻自动拉高。
有的同学还是不能够彻底理解,程序列出来逐句解释。首先,由于 DS18B20 时序要求非常严格,所以在操作时序的时候,为了防止中断干扰总线时序,先关闭总中断。然后第一步,拉低 DS18B20 这个引脚,持续 500 us;第二步,延时 60 us;第三步,读取存在脉冲,并且等待存在脉冲结束。
bit Get18B20Ack(){
bit ack;
EA = 0; //禁止总中断
IO_18B20 = 0; //产生 500us 复位脉冲
DelayX10us(50);
IO_18B20 = 1;
DelayX10us(6); //延时 60us
ack = IO_18B20; //读取存在脉冲
while(!IO_18B20); //等待存在脉冲结束
EA = 1; //重新使能总中断
return ack;
}很多同学对第二步不理解,时序图上明明是 DS18B20 等待 15 us 到 60 us,为什么要延时60 us 呢?举个例子,妈妈在做饭,告诉你大概5分钟到10分钟饭就可以吃了,那么我们什么时候去吃,能够绝对保证吃上饭呢?很明显,10分钟以后去吃肯定可以吃上饭。同样的道理,DS18B20 等待大概是 15 us 到 60 us,我们要保证读到这个存在脉冲,那么 60 us 以后去读肯定可以读到。当然,不能延时太久,太久,超过 75 us,就可能读不到了,为什么是 75 us,大家自己思考一下。
2)ROM 操作指令 我们学 I2C 总线的时候就了解到,总线上可以挂多个器件,通过不同的器件地址来访问不同的器件。同样,1-Wire 总线也可以挂多个器件,但是它只有一条线,如何区分不同的器件呢?
在每个 DS18B20 内部都有一个唯一的64位长的序列号,这个序列号值就存在 DS18B20 内部的 ROM 中。开始的8位是产品类型编码(DS18B20 是 0x10),接着的48位是每个器件唯一的序号,最后的8位是 CRC 校验码。DS18B20 可以引出去很长的线,最长可以到几十米,测不同位置的温度。单片机可以通过和 DS18B20 之间的通信,获取每个传感器所采集到的温度信息,也可以同时给所有的 DS18B20 发送一些指令。这些指令相对来说比较复杂,而且应用很少,所以这里大家有兴趣的话就自己去查手册完成吧,我们这里只讲一条总线上只接一个器件的指令和程序。
Skip ROM(跳过 ROM):0xCC。当总线上只有一个器件的时候,可以跳过 ROM,不进行 ROM 检测。
3)RAM 存储器操作指令 RAM 读取指令,只讲2条,其它的大家有需要可以随时去查资料。 Read Scratchpad(读暂存寄存器):0xBE
这里要注意的是,DS18B20 的温度数据是2个字节,我们读取数据的时候,先读取到的是低字节的低位,读完了第一个字节后,再读高字节的低位,直到两个字节全部读取完毕。
Convert Temperature(启动温度转换):0x44
当我们发送一个启动温度转换的指令后,DS18B20 开始进行转换。从转换开始到获取温度,DS18B20 是需要时间的,而这个时间长短取决于 DS18B20 的精度。前边说 DS18B20 最高可以用12位来存储温度,但是也可以用11位,10位和9位一共四种格式。位数越高,精度越高,9位模式最低位变化1个数字温度变化0.5度,同时转换速度也要快一些,如图16-16所示。
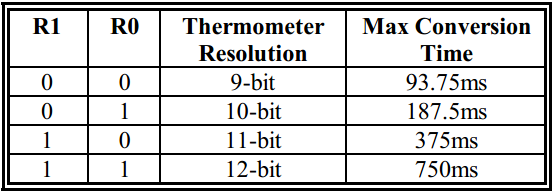
图16-16 DS18B20 温度转换时间
其中寄存器 R1 和 R0 决定了转换的位数,出厂默认值就11,也就是12位表示温度,最大的转换时间是 750 ms。当启动转换后,至少要再等 750 ms 之后才能读取温度,否则读到的温度有可能是错误的值。这就是为什么很多同学读 DS18B20 的时候,第一次读出来的是85度,这个值要么是没有启动转换,要么是启动转换了,但还没有等待一次转换彻底完成,读到的是一个错误的数据。
4)DS18B20 的位读写时序 DS18B20 的时序图不是很好理解,大家对照时序图,结合我的解释,一定要把它学明白。写时序图如图16-17所示。
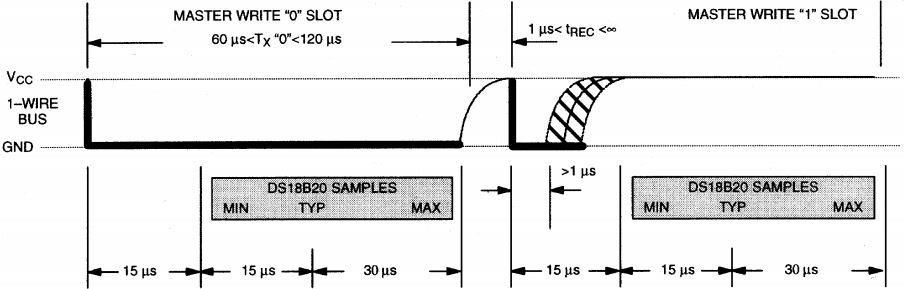
图16-17 DS18B20 位写入时序
当要给 DS18B20 写入0的时候,单片机直接将引脚拉低,持续时间大于 60 us 小于 120 us就可以了。图上显示的意思是,单片机先拉低 15 us 之后,DS18B20 会在从 15 us 到 60 us 之间的时间来读取这一位,DS18B20 最早会在 15 us 的时刻读取,典型值是在 30 us 的时刻读取,最多不会超过 60us,DS18B20 必然读取完毕,所以持续时间超过 60 us 即可。
当要给 DS18B20 写入1的时候,单片机先将这个引脚拉低,拉低时间大于 1 us,然后马上释放总线,即拉高引脚,并且持续时间也要大于 60 us。和写0类似的是,DS18B20 会在 15 us 到 60 us 之间来读取这个1。
可以看出来,DS18B20 的时序比较严格,写的过程中最好不要有中断打断,但是在两个“位”之间的间隔,是大于1小于无穷的,那在这个时间段,我们是可以开中断来处理其它程序的。发送即写入一个字节的数据程序如下。
void Write18B20(unsigned char dat){
unsigned char mask;
EA = 0; //禁止总中断
for (mask=0x01; mask!=0; mask<<=1){ //低位在先,依次移出 8 个 bit
IO_18B20 = 0; //产生 2us 低电平脉冲
_nop_();
_nop_();
if ((mask&dat) == 0){ //输出该 bit 值
IO_18B20 = 0;
}else{
IO_18B20 = 1;
}
DelayX10us(6); //延时 60us
IO_18B20 = 1; //拉高通信引脚
}
EA = 1; //重新使能总中断
}读时序图如图16-18所示。
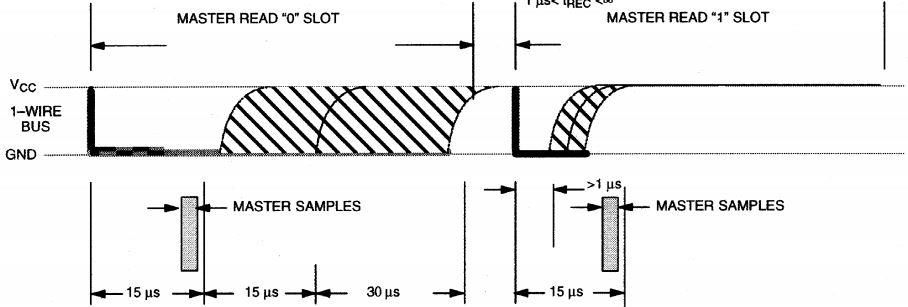
图16-18 DS18B20 位读取时序
当要读取 DS18B20 的数据的时候,我们的单片机首先要拉低这个引脚,并且至少保持 1 us 的时间,然后释放引脚,释放完毕后要尽快读取。从拉低这个引脚到读取引脚状态,不能超过 15 us。大家从图16-18可以看出来,主机采样时间,也就是 MASTER SAMPLES,是在 15 us 之内必须完成的,读取一个字节数据的程序如下。
unsigned char Read18B20({
unsigned char dat;
unsigned char mask;
EA = 0; //禁止总中断
for (mask=0x01; mask!=0; mask<<=1){ //低位在先,依次采集 8 个 bit
IO_18B20 = 0; //产生 2us 低电平脉冲
_nop_();
_nop_();
IO_18B20 = 1; //结束低电平脉冲,等待 18B20 输出数据
_nop_(); //延时 2us
_nop_();
if (!IO_18B20){ //读取通信引脚上的值
dat &= ~mask;
}else{
dat |= mask;
}
DelayX10us(6); //再延时 60us
}
EA = 1; //重新使能总中断
return dat;
}DS18B20 所表示的温度值中,有小数和整数两部分。常用的带小数的数据处理方法有两种,一种是定义成浮点型直接处理,第二种是定义成整型,然后把小数和整数部分分离出来,在合适的位置点上小数点即可。我们在程序中使用的是第二种方法,下面我们就写一个程序,将读到的温度值显示在 1602 液晶上,并且保留一位小数位。
/***************************DS18B20.c 文件程序源代码****************************/
#include <reg52.h>
#include <intrins.h>
sbit IO_18B20 = P3^2; //DS18B20 通信引脚
/* 软件延时函数,延时时间(t*10)us */
void DelayX10us(unsigned char t){
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
/* 复位总线,获取存在脉冲,以启动一次读写操作 */
bit Get18B20Ack(){
bit ack;
EA = 0; //禁止总中断
IO_18B20 = 0; //产生 500us 复位脉冲
DelayX10us(50);
IO_18B20 = 1;
DelayX10us(6); //延时 60us
ack = IO_18B20; //读取存在脉冲
while(!IO_18B20); //等待存在脉冲结束
EA = 1; //重新使能总中断
return ack;
}
/* 向 DS18B20 写入一个字节,dat-待写入字节 */
void Write18B20(unsigned char dat){
unsigned char mask;
EA = 0; //禁止总中断
for (mask=0x01; mask!=0; mask<<=1){ //低位在先,依次移出 8 个 bit
IO_18B20 = 0; //产生 2us 低电平脉冲
_nop_();
_nop_();
if ((mask&dat) == 0){ //输出该 bit 值
IO_18B20 = 0;
}else{
IO_18B20 = 1;
}
}
DelayX10us(6); //延时 60us
IO_18B20 = 1; //拉高通信引脚
EA = 1; //重新使能总中断
}
/* 从 DS18B20 读取一个字节,返回值-读到的字节 */
unsigned char Read18B20(){
unsigned char dat;
unsigned char mask;
EA = 0; //禁止总中断
for (mask=0x01; mask!=0; mask<<=1){ //低位在先,依次采集 8 个 bit
IO_18B20 = 0; //产生 2us 低电平脉冲
_nop_();
_nop_();
IO_18B20 = 1; //结束低电平脉冲,等待 18B20 输出数据
_nop_(); //延时 2us
_nop_();
if (!IO_18B20){ //读取通信引脚上的值
dat &= ~mask;
}else{
dat |= mask;
}
DelayX10us(6); //再延时 60us
}
EA = 1; //重新使能总中断
return dat;
}
/* 启动一次 18B20 温度转换,返回值-表示是否启动成功 */
bit Start18B20(){
bit ack;
ack = Get18B20Ack(); //执行总线复位,并获取 18B20 应答
if (ack == 0){ //如 18B20 正确应答,则启动一次转换
Write18B20(0xCC); //跳过 ROM 操作
Write18B20(0x44); //启动一次温度转换
}
return ~ack; //ack==0 表示操作成功,所以返回值对其取反
}
/* 读取 DS18B20 转换的温度值,返回值-表示是否读取成功 */
bit Get18B20Temp(int *temp){
bit ack;
unsigned char LSB, MSB; //16bit 温度值的低字节和高字节
ack = Get18B20Ack(); //执行总线复位,并获取 18B20 应答
if (ack == 0){ //如 18B20 正确应答,则读取温度值
Write18B20(0xCC); //跳过 ROM 操作
Write18B20(0xBE); //发送读命令
LSB = Read18B20(); //读温度值的低字节
MSB = Read18B20(); //读温度值的高字节
*temp = ((int)MSB << 8) + LSB; //合成为 16bit 整型数
}
return ~ack; //ack==0 表示操作应答,所以返回值为其取反值
}/*Lcd1602.c 文件程序源代码***/ (此处省略,可参考之前章节的代码)
/*****************************main.c 文件程序源代码******************************/
#include <reg52.h>
bit flag1s = 0; //1s 定时标志
unsigned char T0RH = 0; //T0 重载值的高字节
unsigned char T0RL = 0; //T0 重载值的低字节
void ConfigTimer0(unsigned int ms);
unsigned char IntToString(unsigned char *str, int dat);
extern bit Start18B20();
extern bit Get18B20Temp(int *temp);
extern void InitLcd1602();
extern void LcdShowStr(unsigned char x, unsigned char y, unsigned char *str);
void main(){
bit res;
int temp; //读取到的当前温度值
int intT, decT; //温度值的整数和小数部分
unsigned char len;
unsigned char str[12];
EA = 1; //开总中断
ConfigTimer0(10); //T0 定时 10ms
Start18B20(); //启动 DS18B20
InitLcd1602(); //初始化液晶
while (1){
if (flag1s){ //每秒更新一次温度
flag1s = 0;
res = Get18B20Temp(&temp); //读取当前温度
if (res){ //读取成功时,刷新当前温度显示
intT = temp >> 4; //分离出温度值整数部分
decT = temp & 0xF; //分离出温度值小数部分
len = IntToString(str, intT); //整数部分转换为字符串
str[len++] = '.'; //添加小数点
decT = (decT*10) / 16; //二进制的小数部分转换为 1 位十进制位
str[len++] = decT + '0'; //十进制小数位再转换为 ASCII 字符
while (len < 6){ //用空格补齐到 6 个字符长度
str[len++] = ' ';
}
str[len] = '\0'; //添加字符串结束符
LcdShowStr(0, 0, str); //显示到液晶屏上
}else{ //读取失败时,提示错误信息
LcdShowStr(0, 0, "error!");
}
Start18B20(); //重新启动下一次转换
}
}
}
/* 整型数转换为字符串,str-字符串指针,dat-待转换数,返回值-字符串长度 */
unsigned char IntToString(unsigned char *str, int dat){
signed char i = 0;
unsigned char len = 0;
unsigned char buf[6];
if (dat < 0){ //如果为负数,首先取绝对值,并在指针上添加负号
dat = -dat;
*str++ = '-';
len++;
}
do { //先转换为低位在前的十进制数组
buf[i++] = dat % 10;
dat /= 10;
} while (dat > 0);
len += i; //i 最后的值就是有效字符的个数
while (i-- > 0){ //将数组值转换为 ASCII 码反向拷贝到接收指针上
*str++ = buf[i] + '0';
}
*str = '\0'; //添加字符串结束符
return len; //返回字符串长度
}
/* 配置并启动 T0,ms-T0 定时时间 */
void ConfigTimer0(unsigned int ms){
unsigned long tmp; //临时变量
tmp = 11059200 / 12; //定时器计数频率
tmp = (tmp * ms) / 1000; //计算所需的计数值
tmp = 65536 - tmp; //计算定时器重载值
tmp = tmp + 12; //补偿中断响应延时造成的误差
T0RH = (unsigned char)(tmp>>8); //定时器重载值拆分为高低字节
T0RL = (unsigned char)tmp;
TMOD &= 0xF0; //清零 T0 的控制位
TMOD |= 0x01; //配置 T0 为模式 1
TH0 = T0RH; //加载 T0 重载值
TL0 = T0RL;
ET0 = 1; //使能 T0 中断
TR0 = 1; //启动 T0
}
/* T0 中断服务函数,完成 1 秒定时 */
void InterruptTimer0() interrupt 1{
static unsigned char tmr1s = 0;
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
tmr1s++;
if (tmr1s >= 100){ //定时 1s
tmr1s = 0;
flag1s = 1;
}
}